Полярная система координат определяется заданием некоторой точки O , называемой полюсом, исходящего из этой точки луча OA (обозначается также и как Ox ), называемого полярной осью, и масштаба для изменения длин. Кроме того, при задании полярной системы координат должно быть определено, какие повороты вокруг точки O считаются положительными (на чертежах обычно положительными считаются повороты против часовой стрелки).
Итак, выберем на плоскости (рисунок выше) некоторую точку O (полюс) и некоторый выходящий из неё луч Ox . Кроме того, укажем единицу масштаба. Полярными координатами точки M называются два числа ρ и φ, первое из которых (полярный радиус ρ) равно расстоянию точки M от полюса O , а второе (полярный угол φ, который называют также амплитудой) - угол, на который нужно повернуть против часовой стрелки луч Ox до совмещения с лучом OM .
Точку M с полярными координатами ρ и φ обозначают символом M (ρ, φ) .
Связь полярных координат с декартововыми координатами
Установим связь между полярными координатами точки и её декартовыми координатами . Будем предполагать, что начало декартовой прямоугольной системы координат находится в полюсе, а положительная полуось абсцисс совпадает с полярной осью. Пусть точка M имеет декартовы координаты x и y и полярные координаты ρ и φ.Тогда
x = ρ cos φ)
y = ρ sin φ) .
Полярные координаты ρ и φ точки M определяются по её декартовым координатам следующим образом:
Для того, чтобы найти величину угла φ, нужно, используя знаки x и y , определить квадрант, в котором находится точка M , и, кроме того, воспользоваться тем, что тангенс угла φ равен .
Приведённые выше формулы называются формулами перехода от декартовых координат к полярным.
Задачи о точках в полярной системе координат
Пример 1.
A (3; π /4) ;
B (2; -π /2) ;
C (3; -π /3) .
Найти полярные координаты точек, симметричных этим точкам относительно полярной оси.
Решение. При симметрии длина луча не меняется. Следовательно, первая координата - длина луча - у симметричной относительно полярной оси точки будет как и у данной точки. Как видно из рисунка в начале урока, при построении симметричной относительно полярной оси точки данную точку нужно повернуть вокруг полярной оси на тот же угол φ. Следовательно, в полярной системе координат второй координатой симметричной точки будет угол для исходной точки, взятый с противоположным знаком, то есть -φ. Итак, полярные координаты точки, симметричной данной относительно полярной оси будут отличаться лишь второй координатой, и эта координата будет с противоположным знаком. Полярные координаты искомых симметричных точек будут следующими:
A" (3; -π /4) ;
B" (2; π /2) ;
C" (3; π /3) .
Пример 2. В полярной системе координат на плоскости даны точки
A (1; π /4) ;
B (5; π /2) ;
C (2; -π /3) .
Найти полярные координаты точек, симметричных этим точкам относительно полюса.
Решение. При симметрии длина луча не меняется. Следовательно, первая координата - длина луча - у симметричной относительно полюса точки будет как и у данной точки. Симметричная относительно полюса точка получается вращением исходной точки на 180 градусов против часовой стрелки, то есть на угол π . Следовательно, вторая координата точки, симметричной данной относительно полюса рассчитывается как φ + π (если в результате получится числитель больше знаменателя, то вычтем из полученного числа один полный оборот, то есть 2π ). Получаем следующие координаты точек, симметричных данным относительно полюса:
A" (1; 3π /4) ;
B" (5; -π /2) ;
C" (2; 2π /3) .
Пример 3. Полюс полярной системы координат совпадает с началом декартовых прямоугольных координат, а полярная ось совпадает с положительной полуосью абсцисс. В полярной системе координат даны точки
A (6; π /2) ;
B (5; 0) ;
C (2; π /4) .
Найти декартовы координаты этих точек.
Решение. Используем формулы перехода от полярных координат к декартовым:
x = ρ cos φ)
y = ρ sin φ) .
Получаем следующие декартовы координаты данных точек:
A (0; 6) ;
B (5; 0) ;
C" (√2; √2) .
Пример 4. Полюс полярной системы координат совпадает с началом декартовых прямоугольных координат, а полярная ось совпадает с положительной полуосью абсцисс. В декартовой прямоугольной системе координат даны точки
A (0; 5) ;
B (-3; 0) ;
C (√3; 1) .
Найти полярные координаты этих точек.
Пример 1. Вычислим на геоцентрической небесной сфере часовой угол Н и склонение тела, имеющего азимут (измеряемый в восточном направлении от точки севера) А и высоту а. При этом будем считать, что широта наблюдателя равна
На рис. 2.11 показана соответствующая небесная сфера, на которой X обозначает положение тела, а остальные символы имеют обычные значения.
Теорема косинусов, примененная к сферическому треугольнику PZX, дает
Отсюда можно вычислить . Воспользовавшись теоремой косинусов еще раз, получаем
![]()
откуда находим Н, так как б уже известно.
С другой стороны, используя формулу, связывающую четыре величины (90° - а), (360° - А), и H, получаем
Пример 2. Считая, что наклонение эклиптики равно преобразуем эклиптические координаты (небесную долготу К и небесную широту Р) космического аппарата в геоцентрические экваториальные координаты (прямое восхождение а и склонение ).
Как показано на рис. 2.12, в сферическом треугольнике КРХ (X - положение космического аппарата на небесной сфере) содержится вся необходимая информация.

Воспользовавшись по очереди теоремой косинусов, теоремой синусов и аналогом теоремы косинусов, получаем

откуда можно найти а и б.
Читателю предлагается в качестве упражнения провести преобразования, обратные рассмотренным в примерах 1 и 2.
Пример 3. По известным гелиоцентрическим прямоугольным координатам космического аппарата, обращающегося вокруг Солнца, определим его геоцентрическое расстояние , прямое восхождение а и склонение .
На этом примере будет проиллюстрирован ряд важных принципов. Для наблюдения аппарата с Земли или связи с ним в заданный момент времени нужно знать геоцентрические прямое восхождение, склонение и удаление аппарата. С другой стороны, межпланетный
планетный космический аппарат движется по орбите вокруг Солнца, а элементы такой орбиты определяются в гелиоцентрической системе. Зная элементы и время, можно определить прямоугольные координаты в системе с началом в центре Солнца. Ниже мы увидим, как это делается (см. гл. 4). В настоящем примере мы будем предполагать, что основой прямоугольной системы координат служат эклиптика и направление на Т. и покажем, как эти прямоугольные координаты можно преобразовать в геоцентрическое расстояние, прямое восхождение и склонение. В астрономии такое преобразование является стандартной процедурой. Обратная задача определения элементов орбиты по измерениям прямого восхождения и склонения тела также является стандартной процедурой.
Однако она сложнее и будет рассмотрена позже.

Задача решается в несколько этапов:
1) осуществляется переход от гелиоцентрической эклиптической прямоугольной системы координат к гелиоцентрической экваториальной прямоугольной системе;
2) от гелиоцентрической экваториальной прямоугольной системы переходим к геоцентрической экваториальной прямоугольной системе;
3) геоцентрические экваториальные прямоугольные координаты преобразуем в геоцентрическое расстояние, прямое восхождение и склонение.
Эти преобразования проводятся следующим образом:
1) На рис. 2.13 V обозначает положение аппарата относительно Солнца S. Относительно осей (образующих прямоугольную систему) аппарат имеет координаты так, что справедливо соотношение
SA (А - перигелий) пересекается со сферой в точке , а SV - в точке Q. Тогда имеем
В силу теоремы косинусов, примененной к сферическому треугольнику QTN, в котором угол равен 180° - i, получаем
![]()
следовательно,

Аналогично, применяя теорему косинусов к треугольнику QNB и вспоминая, что
![]()
получаем
Наконец, применение теоремы косинусов к треугольнику QKN дает
Чтобы перейти к гелиоцентрическим экваториальным прямоугольным координатам, заметим, что новые оси ST, SC и SP обладают следующими свойствами: ось SC лежит в экваториальной плоскости под углом 90° к ST, а ось SP перпендикулярна этой плоскости и направлена так, что три оси образуют правую тройку. Тогда новые оси SC и SP получаются из старых осей SB и SK поворотом последних вокруг на угол . Если гелиоцентрические
экваториальные прямоугольные координаты аппарата обозначить , то

Используя уравнения (2.4), (2.5) и (2.6), получаем

Введем ряд вспомогательных углов так, чтобы они удовлетворяли соотношениям

Тогда уравнения (2.7), (2.8) и (2.9) принимают вид

Этими формулами удобно пользоваться, если нужно вычислять прямоугольные координаты аппарата в нескольких положениях. Вспомогательные величины a, A, D, В, с, С являются функциями только элементов ; поэтому их можно вычислить один раз для всех положений. Переменные же и f должны вычисляться для каждого положения (способ их вычисления будет описан позднее - см. гл. 4). Следует, однако, заметить, что являются постоянными только в том случае, когда на аппарат не действуют никакие возмущения. Фактически такая ситуация наблюдается в большинстве межпланетных полетов на пассивных участках траектории.
2) Теперь начало координат переносится из центра Солнца в центр Земли. На рис. 2.14 Е - Земля, S - Солнце, и SP - оси гелиоцентрической экваториальной системы координат,
И - оси геоцентрической экваториальной прямоугольной системы координат, плоскость - плоскость земного экватора. Пусть координаты аппарата V относительно геоцентрических осей, так что
Гелиоцентрические экваториальные координаты Земли. Тогда


Если через (X, Y, Z) обозначить геоцентрические экваториальные координаты Солнца, то

Координаты
- это величины, определяющие положение любой точки на поверхности или в пространстве в принятой системе координат. Система координат устанавливает начальные (исходные) точки, линии или плоскости для отсчета необходимых величин - начало отсчета координат и единицы их исчисления. В топографии и геодезии наиболь¬шее применение получили системы географических, прямоугольных, полярных и биполярных координат.
Географические координаты (рис. 2.8) применяются для определения положения точек поверхности Земли на эллипсоиде (шаре). В этой системе координат исходными являются плоскость начального меридиана и плос¬кость экватора. Меридианом называют линию сечения эллипсоида плоскостью, проходящей через данную точку и ось вращения Земли.
Параллелью называют линию сечения эллипсоида плоскостью, проходящей через данную точку и пер¬пендикулярную земной оси. Параллель, плоскость которой проходит через центр эллипсоида, называется экватором. Через каждую точку, лежащую на поверхности земного шара, можно провести только один меридиан и только одну параллель.
Географические координаты
- это угловые величины: долгота l и широта j.
Географической долготой l называется двугранный угол, заключенный между плоскостью данного меридиана (проходящего через точку В) и плоскостью начального меридиана. За начальный (нулевой) меридиан принят меридиан, проходящий через центр главного зала Гринвичской обсерватории в пределах г. Лондона. Для точки В долгота определяется углом l = WCD. Счет долгот ведут от начального меридиана в обе стороны - на восток и на запад. В связи с этим различают западные и восточные долготы, которые изменяются от 0° до 180°.
Географической широтой
j называется угол, составленный плоскостью экватора и отвесной линией, проходящей через данную точку. Если Землю принимать за шар, то для точки В (рис. 2.8) широта j определяется углом DCB. Широты, отсчитываемые от экватора к северу, называются северными, а к югу - южными, они изменяются от 0° на экваторе до 90° на полюсах.
Географические координаты могут быть получены на основании астрономических наблюдений или геодезических измерений. В первом случае их называют астрономическими, а во втором - геодезическими (L - долгота, B - широта). При астрономических наблюдениях проецирование точек на поверхность относимости осуществляется отвесными линиями, при геодезических измерениях - нормалями. Поэтому величины астрономических и геодезических координат отличаются на величину уклонения отвесной линии.
Использование разными государствами различных референц-эллипсоидов приводит к различиям координат одних и тех же пунктов, вычисленных относительно разных исходных поверхностей. Практически это выражается в общем смещении картографического изображения относительно меридианов и параллелей на картах крупного и среднего масштабов.
Прямоугольными координатами
называются линейные величины - абсцисса и ордината, определяющие положение точки на плоскости относительно исходных направлений.
(рис. 2.9)
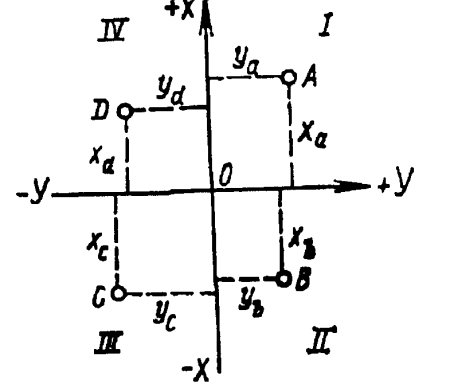
В геодезии и топографии принята правая система прямоугольных координат. Это отличает ее от левой системы координат, используемой в математике. Исходными направлениями служат две взаимно перпендикулярные линии с началом отсчета в точке их пересечения О.
Прямая ХХ (ось абсцисс) совмещается с направлением меридиана, проходящего через начало координат, или с направлением, параллельным некоторому меридиану. Прямая YY (ось ординат) проходит через точку О перпендикулярную оси абсцисс. В такой системе положение точки на плоскости определяется кратчайшим расстоянием до нее от осей координат. Положение точки А определяется длиной перпендикуляров Xа и Yа. Отрезок Xа называется абсциссой точки А, а Yа - ординатой этой точки. Прямоугольные координаты обычно выражаются в метрах. Осями абсцисс и ординат участок местности в точке О делится на четыре четверти (рис. 2.9). Название четвертей определяется принятыми обозначениями стран света. Четверти нумеруются по направлению хода часовой стрелки: I - СВ; II - ЮВ; III - ЮЗ; IV - СЗ.
В табл. 2.3 показаны знаки абсцисс Х и ординат Y для точек, находящихся в разных четвертях и даны их названия.

Таблица 2.3
Абсциссы точек, расположенные вверх от начала координат считаются положительными, а вниз от нее - отрицательными, ординаты точек, расположенные вправо - положительными, влево - отрицательными. Система плоских прямоугольных координат применяется на ограниченных участках земной поверхности, которые могут быть приняты за плоские.
Координаты, началом отсчета которых является какая-либо точка местности, называются полярными. В данной системе координат производится измерение углов ориентирования. На горизонтальной плоскости (рис. 2.10) через произвольно выбранную точку О, называемую полюсом, проводят прямую ОХ - полярную ось.

Тогда положение любой точки, например, М будет определяться радиусом - вектором r1 и углом направления a1 , а точки N - соответственно r2 и a2. Углы a1 и a2 измеряют от полярной оси по ходу часовой стрелки до радиуса-вектора. Полярная ось может располагаться произвольно или совмещаться с направлением какого-либо меридиана, проходящего через полюс О.
Система биполярных координат (рис. 2.11) представляет собой два выбранных неподвижных полюса О1 и О2 , соединенные прямой - полярной осью. Данная система координат позволяет определить положение точки М относительно полярной оси на плоскости при помощи двух углов b1 и b2, двух радиусов-векторов r1 и r2 или их комбинаций. Если известны прямоугольные координаты точек О1 и О2 , то положение точки М можно вычислить аналитическим способом. 
Рис. 2.11

Рис. 2.12
Высоты точек земной поверхности. Для определения положения точек физической поверхности Земли недостаточно знать только плановые координаты X, Y или l, j, необходима третья координата - высота точки Н. Высотой точки Н (рис. 2.12) называется расстояние по отвесному направлению от данной точки (А´; В´´) до принятой основной уровенной поверхности MN. Числовое значение высоты точки называется отметкой. Высоты, отсчитываемые от основной уровенной поверхности MN, называют абсолютными высотами (АА´; ВВ´´), а определяемые относительно произвольно выбранной уровенной поверхности - условными высотами (В´В´´). Разность высот двух точек или расстояние по отвесному направлению между уровенными поверхностями, проходящими через две любые точки Земли называется относительной высотой (В´В´´) или превышением этих точек h.
В Республике Беларусь принята Балтийская система высот 1977 г. Счет высот ведется от уровенной поверхности, совпадающей со средним уровнем воды в Финском заливе, от нуля Кронштадского футштока.
Вот еще
Системы координат, применяемые в топографии: географические, плоские прямоугольные, полярные и биполярные координаты, их сущность и использование
Координатами называются угловые и линейные величины (числа), определяющие положение точки на какой-либо поверхности или в пространстве.
В топографии применяют, такие системы координат, которые позволяют наиболее просто и однозначно определять положение точек земной поверхности как по результатам непосредственных измерений на местности, так и с помощью карт. К числу таких систем относятся географические, плоские прямоугольные, полярные и биполярные координаты.
Географические координаты (рис.1) - угловые величины: широта (У) и долгота (L), определяющие положение объекта на земной поверхности относительно начала координат - точки пересечения начального (Гринвичского) меридиана с экватором. На карте географическая сетка обозначена шкалой на всех сторонах рамки карты. Западная и восточная стороны рамки являются меридианами, а северная и южная - параллелями. В углах листа карты подписаны географические координаты точек пересечения сторон рамки.
Рис. 1. Система географических координат на земной поверхности
В системе географических координат положение любой точки земной поверхности относительно начала координат определяется в угловой мере. За начало у нас и в большинстве других государств принята точка пересечения начального (Гринвичского) меридиана с экватором. Являясь, таким образом, единой для всей нашей планеты, система географических координат удобна для решения задач по определению взаимного положения объектов, расположенных на значительных расстояниях друг от друга.
Поэтому в военном деле эту систему используют главным образом для ведения расчетов, связанных с применением боевых средств дальнего действия, например баллистических ракет, авиации и др.
Плоские прямоугольные координаты (рис. 2) - линейные величины, определяющие положение объекта на плоскости относительно принятого начала координат - пересечение двух взаимно перпендикулярных прямых (координатных осей Х и Y).
В топографии каждая 6-градусная зона имеет свою систему прямоугольных координат. Ось Х - осевой меридиан зоны, ось Y - экватор, а точка пересечения осевого меридиана с экватором - начало координат.
![]()
Рис. 2. Система плоских прямоугольных координат на картах
Система плоских прямоугольных координат является зональной; она установлена для каждой шестиградусной зоны, на которые делится поверхность Земли при изображении ее ни картах в проекции Гаусса, и предназначена для указания положения изображений точек земной поверхности на плоскости (карте) в этой проекции.
Началом координат в зоне является точка пересечения осевого меридиана с экватором, относительно которой и определяется в линейной мере положение всех остальных точек зоны. Начало координат зоны и ее координатные оси занимают строго определенное положение на земной поверхности. Поэтому система плоских прямоугольных координат каждой зоны связана как с системами координат всех остальных зон, так и с системой географических координат.
Применение линейных величин для определения положения точек делает систему плоских прямоугольных координат весьма удобной для ведения расчетов как при работе на местности, так и на карте. Поэтому в войсках эта система находит наиболее широкое применение. Прямоугольными координатами указывают положение точек местности, своих боевых порядков и целей, с их помощью определяют взаимное положение объектов в пределах одной координатной зоны или на смежных участках двух зон.
Системы полярных и биполярных координат являются местными системами. В войсковой практике они применяются для определения положения одних точек относительно других на сравнительно небольших участках местности, например при целеуказании, засечке ориентиров и целей, составлении схем местности и др. Эти системы могут быть связаны с системами прямоугольных и географических координат.
Форма и размеры земли. системы координат. Высоты.
2.1. Форма и размеры Земли
Изучение формы и размеров Земли включает решение двух задач. Это - установление некоторой сглаженной, обобщенной, теоретической фигуры Земли и определение отклонений от нее фактической физической поверхности.
Учитывая, что поверхность океанов и морей составляет 71% поверхности Земли, а поверхность суши - только 29%, за теоретическую фигуру Земли принято тело, ограниченное поверхностью океанов в их спокойном состоянии, продолженной и под материками, и называемое геоидом .
Поверхность, в каждой своей точке перпендикулярная к отвесной линии (направлению силы тяжести), называется уровенной поверхностью . Из множества уpовенных поверхностей одна совпадает с поверхностью геоида.
Из-за неравномерности распределения масс в земной коре геоид имеет неправильную геометрическую форму, и его поверхность нельзя выразить математически, что необходимо для решения геодезических задач. При решении геодезических задач геоид заменяют близкими к нему геометрически правильными поверхностями.
Так, для приближенных вычислений Землю принимают за шар с радиусом 6371 км.
Ближе к форме геоида подходит эллипсоид – фигура, получаемая вращением эллипса (рис. 2.1) вокруг его малой оси. Размеры земного эллипсоида характеризуют следующими основными параметрами: a - большая полуось, b - малая полуось, a - полярное сжатие и e – первый эксцентриситет меридианного эллипса, где и .
Различают общеземной эллипсоид и референц-эллипсоид.
Центр общеземного эллипсоида помещают в центре масс Земли, ось вращения совмещают со средней осью вращения Земли, а размеры принимают такие, чтобы обеспечить наибольшую близость поверхности эллипсоида к поверхности геоида. Общеземной эллипсоид используют при решении глобальных геодезических задач, и в частности, при обработке спутниковых измерений. В настоящее время широко пользуются двумя общеземными эллипсоидами: ПЗ-90 (Параметры Земли 1990 г, Россия) и WGS-84 (Мировая геодезическая система 1984 г, США).
Референц-эллипсоид – эллипсоид, принятый для геодезических работ в конкретной стране. С референц-эллипсоидом связана принятая в стране система координат. Параметры референц-эллипсоида подбираются под условием наилучшей аппроксимации данной части поверхности Земли. При этом совмещения центров эллипсоида и Земли не добиваются.
В России с 1946 г. в качестве референц-эллипсоида используется эллипсоид Красовского с параметрами: а = 6 378 245 м, a = 1/ 298,3.
2.2. Системы координат, применяемые в геодезии
Для определения положения точек в геодезии применяют пространственные прямоугольные, геодезические и плоские прямоугольные координаты.
Пространственные прямоугольные координаты . Начало системы координат расположено в центре O земного эллипсоида (рис. 2.2).
Ось Z направлена по оси вращения эллипсоида к северу. Ось Х лежит в пересечении плоскости экватора с начальным - гринвичским меридианом. Ось Y направлена перпендикулярно осям Z и X на восток.
Геодезические координаты . Геодезическими координатами точки являются ее широта, долгота и высота (рис. 2.2).
Геодезической широтой точки М называется угол В , образованный нормалью к поверхности эллипсоида, проходящей через данную точку, и плоскостью экватора.
Широта отсчитывается от экватора к северу и югу от 0° до 90° и называется северной или южной. Северную широту считают положительной, а южную - отрицательной.
Плоскости сечения эллипсоида, проходящие через ось OZ , называются геодезическими меридианами .
Геодезической долготой точки М называется двугранный угол L , образованный плоскостями начального (гринвичского) геодезического меридиана и геодезического меридиана данной точки.
Долготы отсчитывают от начального меридиана в пределах от 0° до 360° на восток, или от 0° до 180° на восток (положительные) и от 0° до 180° на запад (отрицательные).
Геодезической высотой точки М является ее высота Н над поверхностью земного эллипсоида.
Геодезические координаты с пространственными прямоугольными координатами связаны формулами
X = (N + H ) cosB cosL ,
Y = (N+H ) cosB sinL ,
Z = [(1 - e 2 ) N+H ] sinB ,
где e - первый эксцентриситет меридианного эллипса и N - радиус кривизны первого вертикала. При этом N=a/ (1 - e 2 sin 2 B ) 1/2 .
Геодезические и пространственные прямоугольные координаты точек определяют с помощью спутниковых измерений, а также путем их привязки геодезическими измерениями к точкам с известными координатами.
Отметим, что наряду с геодезическими существуют еще астрономические широта и долгота. Астрономическая широта j это - угол, составленный отвесной линией в данной точке с плоскостью экватора. Астрономическая долгота l – угол между плоскостями Гринвичского меридиана и проходящего через отвесную линию в данной точке астрономического меридиана. Астрономические координаты определяют на местности из астрономических наблюдений.
Астрономические координаты отличаются от геодезических потому, что направления отвесных линий не совпадают с направлениями нормалей к поверхности эллипсоида. Угол между направлением нормали к поверхности эллипсоида и отвесной линией в данной точке земной поверхности называется уклонением отвесной линии .
Обобщением геодезических и астрономических координат является термин – географические координаты .
Плоские прямоугольные координаты . Для решения задач инженерной геодезии от пространственных и геодезических координат переходят к более простым – плоским координатам, позволяющим изображать местность на плоскости и определять положение точек двумя координатами х и у .
Поскольку выпуклую поверхность Земли изобразить на плоскости без искажений нельзя, введение плоских координат возможно только на ограниченных участках, где искажения так малы, что ими можно пренебречь. В России принята система прямоугольных координат, основой которой является равноугольная поперечно–цилиндрическая проекция Гаусса. Поверхность эллипсоида изображается на плоскости по частям, называемым зонами. Зоны представляют собой сферические двуугольники, ограниченные меридианами, и простирающиеся от северного полюса до южного (рис. 2.3). Размер зоны по долготе равен 6°. Центральный меридиан каждой зоны называется осевым. Нумерация зон идет от Гринвича к востоку.
Долгота осевого меридиана зоны с номером N равна:
l 0 = 6°× N - 3° .
Осевой меридиан зоны и экватор изображаются на плоскости прямыми линиями (рис. 2.4). Осевой меридиан принимают за ось абсцисс x , а экватор - за ось ординат y. Их пересечение (точка O ) служит началом координат данной зоны.
Чтобы избежать отрицательных значений ординат, координаты пересечения принимают равными x 0 = 0, y 0 = 500 км, что равносильно смещению оси х к западу на 500 км.
Чтобы по прямоугольным координатам точки можно было судить, в какой зоне она расположена, к ординате y слева приписывают номер координатной зоны.
Пусть например, координаты точки А имеют вид:
x А = 6 276 427 м
y А = 12 428 566 м
Эти координаты указывают на то, что точка А находится на расстоянии 6276427 м от экватора, в западной части (y < 500 км) 12-ой координатной зоны, на расстоянии 500000 - 428566 = 71434 м от осевого меридиана.
Для пространственных прямоугольных, геодезических и плоских прямоугольных координат в России принята единая система координат СК-95, закрепленная на местности пунктами государственной геодезической сети и построенная по спутниковым и наземным измерениям по состоянию на эпоху 1995 г.
Местные системы прямоугольных координат. При строительстве различных объектов часто используют местные (условные) системы координат, в которых направления осей и начало координат назначают, исходя из удобства их использования в ходе строительства и последующей эксплуатации объекта.
Так, при съемке железнодорожной станции ось у направляют по оси главного железнодорожного пути в направлении возрастания пикетажа, а ось х – по оси здания пассажирского вокзала.
При строительстве мостовых переходов ось х обычно совмещают с осью моста, а ось y идет в перпендикулярном направлении.
При строительстве крупных промышленных и гражданских объектов оси x и y направляют параллельно осям строящихся зданий.
2.3. Системы высот
Счет высот в инженерной геодезии ведут от одной из уровенных поверхностей.
Высотой точки называют расстояние по отвесной линии от точки до уровенной поверхности, принятой за начало счета высот.
Если высоты отсчитывают от основной уровенной поверхности, то есть от поверхности геоида, их называют абсолютными высотами Аа и Вв - абсолютные высоты точек А и В .
Если за начало счета высот выбрана какая-либо другая уровенная поверхность, то высоты называют условными . На рис. 2.5 отрезки отвесных линий Аа ¢ и Вв ¢ - условные высоты точек А и В .
В России принята Балтийская система высот. Счет абсолютных высот ведут от уровенной поверхности, проходящей через нуль Кронштадтского футштока .
Численное значение высоты принято называть отметкой. Например, если высота точки А равна H А = 15,378 м, то говорят, что отметка точки равна 15,378 м.
Разность высот двух точек называется превышением . Так, превышение точки В над точкой А равно
h AB = H В - H A .
Зная высоту точки А , для определения высоты точки В на местности измеряют превышение h AB . Высоту точки В вычисляют по формуле
H В = H A + h AB .
Измерение превышений и последующее вычисление высот точек называется нивелированием.
Абсолютную высоту точки следует отличать от ее геодезической высоты, то есть высоты, отсчитываемой от поверхности земного эллипсоида (см. раздел 2.2). Геодезическая высота отличается от абсолютной высоты на величину отклонения поверхности геоида от поверхности эллипсоида.
В заключение отметим, что точное определение положения поверхности геоида в области материков невозможно. Поэтому в России принято отсчитывать высоты от близкой к геоиду, но доступной точному определению вспомогательной поверхности, названной квазигеоидом . Высоты, отсчитываемые от поверхности геоида, называются ортометрическими высотами, а отсчитываемые от поверхности квазигеоида – нормальными высотами. На результаты измерений, выполняемых в инженерной геодезии, различия в двух названных системах высот влияния не оказывают, и в дальнейшем мы их различать не будем, а будем пользоваться введенным выше обобщенным понятием – абсолютные высоты.
Последние материалы
Основные закономерности татического деформирования грунтов
За последние 15...20 лет в результате многочисленных экспериментальных исследований с применением рассмотренных выше схем испытаний получены обширные данные о поведении грунтов при сложном напряженном состоянии. Поскольку в настоящее время в…
Упругопластическое деформирование среды и поверхности нагружения
Деформации упругопластических материалов, в том числе и грунтов, состоят из упругих (обратимых) и остаточных (пластических). Для составления наиболее общих представлений о поведении грунтов при произвольном нагружении необходимо изучить отдельно закономерности…
Описание схем и результатов испытаний грунтов с использованием инвариантов напряженного и деформированного состояний
При исследовании грунтов, как и конструкционных материалов, в теории пластичности принято различать нагружение и разгрузку. Нагружением называют процесс, при котором происходит нарастание пластических (остаточных) деформаций, а процесс, сопровождающийся изменением (уменьшением)…
Инварианты напряженного и деформированного состояний грунтовой среды
Применение инвариантов напряженного и деформированного состояний в механике грунтов началось с появления и развития исследований грунтов в приборах, позволяющих осуществлять двух- и трехосное деформирование образцов в условиях сложного напряженного состояния…
О коэффициентах устойчивости и сопоставление с результатами опытов
Так как во всех рассмотренных в этой главе задачах грунт считается находящимся в предельном напряженном состоянии, то все результаты расчетов соответствуют случаю, когда коэффициент запаса устойчивости к3 = 1. Для…
Давление грунта на сооружения
Особенно эффективны методы теории предельного равновесия в задачах определения давления грунта на сооружения, в частности подпорные стенки. При этом обычно принимается заданной нагрузка на поверхности грунта, например, нормальное давление р(х), и…
Несущая способность оснований
Наиболее типичной задачей о предельном равновесии грунтовой среды является определение несущей способности основания под действием нормальной или наклонной нагрузок. Например, в случае вертикальных нагрузок на основании задача сводится к тому…
Процесс отрыва сооружений от оснований
Задача оценки условий отрыва и определения требуемого для этого усилия возникает при подъеме судов, расчете держащей силы «мертвых» якорей, снятии с грунта морских гравитационных буровых опор при их перестановке, а…
Решения плоской и пространственной задач консолидации и их приложения
Решений плоской и тем более пространственных задач консолидации в виде простейших зависимостей, таблиц или графиков очень ограниченное число. Имеются решения для случая приложения к поверхности двухфазного грунта сосредоточенной силы (В…







